Robotstudio
|
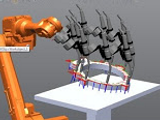
Programar offline con la Tecnología de Robot Virtual (VRT) es como tener el robot real en el PC La programación offline es la mejor forma de aumentar la rentabilidad de la inversión en sistemas de robots. La simulación de ABB y el software de programación offline RobotStudio permiten programar los robots en un PC sin necesidad de parar la producción. También se pueden preparar los programas de los robots anticipadamente, lo que implica un aumento de la productividad. |
 |
|||||||||||||||||||
 |
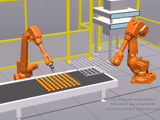
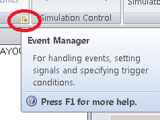
RobotStudio aporta herramientas que aumentan la rentabilidad del sistema de robots, pues permite realizar tareas tales como formación, programación y optimización de programas sin alterar la producción. Esto añade muchas ventajas, entre ellas:
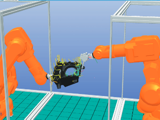
RobotStudio se basa en el controlador virtual de ABB, una copia exacta del software real que emplean los robots en la producción. Ello permite ejecutar simulaciones muy realistas, utilizando programas de robots reales y archivos de configuración idénticos a los que se emplean en la fábrica. |
|||||||||||||||||||
 |
|
|||||||||||||||||||
|
|
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
 |
|
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||